A blind navigation guide model for obstacle avoidance using distance vision estimation based YOLO-V8n
Keywords:
YOLO-V8n, COCO dataset, Blind guide, DVE, WFEAbstract
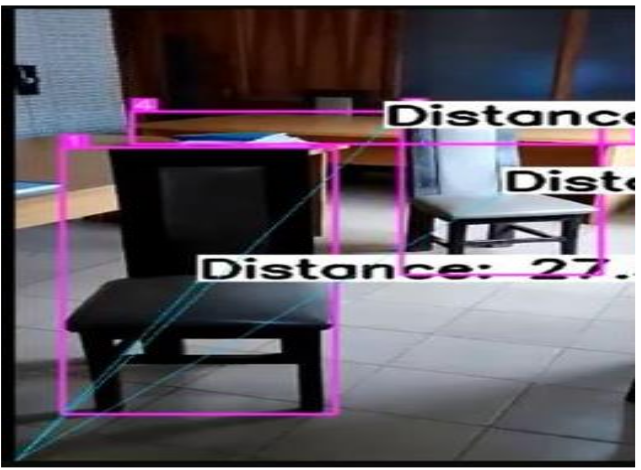
Obstacle is an object positioned along a path of propagation with the potential to cause a collision and hence, an accident. Over the years, several papers have applied advanced computer vision techniques, particularly transfer learning algorithms, to solve this problem, but despite their success, in specific vision applications such as blind guide navigation systems, the model finds it difficult to distinguish between objects and obstacles recognized in the same video frame, hence attracting research attention. In this paper, the aim was to develop a blind navigation guide model for obstacle avoidance using distance vision estimation-based YOLO-V8n. To achieve this, an improved data model was developed using the MS COCO dataset and primary data collected from several indoor environments. Then, the YOLO-V8n architecture was improved by adding a Weighted Feature Enhancement (WFE) model to the backbone for improved feature extraction, and Bi-directional Feature Pyramid Network (Bi-FPN) was applied to the neck to improve multi-scale feature representation. In addition, a Distance Vision Estimation (DVE) algorithm was developed and applied to the Bi-FPN before connecting it to the head of the YOLO-V8n to facilitate simultaneous object detection and distance measurement in real-time video. Furthermore, the issue of bounding box overlap in the model was addressed by applying a Wise Intersection over Unit (WIoU) loss function. Collectively, these formulated the new transfer learning algorithm called YOLO-V8n+WFE+Bi-FPN+DVE+WIoU used in this work for high-level obstacle detection and distance estimation. The model was trained considering different experimental architectures of the YOLO-V8 and loss functions, respectively, and then evaluated with precision, recall, mean absolute precision, and average precision, respectively, before validation through comparative analysis. Upon selection of the best model, it was further validated through comparison with other state-of-the art algorithms before deployment for obstacle avoidance in an indoor environment, having satisfied the condition of reliability. Real world testing of the model was performed at four different indoor sites, and the results showed that while the model was able to correctly classify objects, it could also measure their distance accurately, thereby making it suitable for deployment as a blind vision guide navigation system.
Published
How to Cite
Issue
Section
Copyright (c) 2024 Ebere Uzoka Chidi, Edward Anoliefo, Collins Udanor, Asogwa Tochukwu Chijindu, Lois Onyejere Nwobodo

This work is licensed under a Creative Commons Attribution 4.0 International License.
How to Cite
Similar Articles
- Olumide S. Adesina, Adedayo F. Adedotuun, Kayode S. Adekeye, Ogbu F. Imaga, Adeleke J. Adeyiga, Toluwalase J. Akingbade, On logistic regression versus support vectors machine using vaccination dataset , Journal of the Nigerian Society of Physical Sciences: Volume 6, Issue 1, February 2024
- Philemon Uten Emmoh, Christopher Ifeanyi Eke, Timothy Moses, A feature selection and scoring scheme for dimensionality reduction in a machine learning task , Journal of the Nigerian Society of Physical Sciences: Volume 7, Issue 1, February 2025
- Muhammad Dahiru Liman, Salamatu Ibrahim Osanga, Esther Samuel Alu, Sa'adu Zakariya, Regularization Effects in Deep Learning Architecture , Journal of the Nigerian Society of Physical Sciences: Volume 6, Issue 2, May 2024
- Santosh Kumar Upadhyay, Rajesh Prasad, Efficient-ViT B0Net: A high-performance light weight transformer for rice leaf disease recognition and classification , Journal of the Nigerian Society of Physical Sciences: Volume 7, Issue 4, November 2025
- Christian N. Nwaeme, Adewale F. Lukman, Robust hybrid algorithms for regularization and variable selection in QSAR studies , Journal of the Nigerian Society of Physical Sciences: Volume 5, Issue 4, November 2023
- Idongesit E. Eteng, Udeze L. Chinedu, Ayei E. Ibor, A stacked ensemble approach with resampling techniques for highly effective fraud detection in imbalanced datasets , Journal of the Nigerian Society of Physical Sciences: Volume 7, Issue 1, February 2025
- Isah Charles Saidu, Musa Yusuf, Florence Chukwuemeka Nemariyi, Ayenopwa Comfort George, Indexing techniques and structured queries for relational databases management systems , Journal of the Nigerian Society of Physical Sciences: Volume 6, Issue 4, November 2024
- A. B Yusuf, R. M Dima, S. K Aina, Optimized Breast Cancer Classification using Feature Selection and Outliers Detection , Journal of the Nigerian Society of Physical Sciences: Volume 3, Issue 4, November 2021
- Stephen Olushola Oladosu, Alfred Sunday Alademomi , James Bolarinwa Olaleye, Joseph Olalekan Olusina, Tosin Julius Salami, Evaluation of ANFIS Predictive Ability Using Computed Sediment from Gullies and Dam , Journal of the Nigerian Society of Physical Sciences: Volume 5, Issue 2, May 2023
- Raphael Ozighor Enihe, Rajesh Prasad, Francisca Nonyelum Ogwueleka, Fatimah Binta Abdullahi, The effect of imbalance data mitigation techniques on cardiovascular disease prediction , Journal of the Nigerian Society of Physical Sciences: Volume 7, Issue 2, May 2025
You may also start an advanced similarity search for this article.